– 堅牢性とサイズ、重量、電力の最適化の必要性 -
 はじめに:
はじめに:
高度に自動化された完全自動運転の自動車の時代はもうすぐです。これらの SAE Level 4 およびLevel 5 車両には、大量の複雑なデータを処理するために、イーサネットスイッチファブリックアーキテクチャに基づく超高速ネットワーク通信のサポート、大容量ストレージを提供する高性能組み込みコンピューティングプラットフォームが必要になります。
人工知能ベースのディープ・ラーニング・ニューラル・ネットワークは、ほぼ無限で進化し続ける運転や路上での危険シナリオを管理できる車両を実現する上で不可欠です。スーパーコンピューターレベル(数十TeraFLOPS)の電力は、数百ワットオーダーの熱放散を生成します。高度に自動化された運転のミッションクリティカルな性質を考えると、ソリューションセットは、自動車の安全システムと同じくらい信頼性が高く、車両統合に適したサイズである必要があります。自動車の環境は、AI対応のプロセッサを利用するゲームコンソール、デスクトップ、およびサーバーに比べて過酷です。言い換えれば、これらの自律型コンピュータは高度に自動化された車両が進化するアクティブセーフティおよびドライバー支援製品の温度、耐久性、および耐用年数の要件を満たす必要があります。
今日の安全システム用の電子制御ユニットは、通常、-40° ~ +85°C の動作温度範囲を満たすように指定されており、100,000マイルの耐用年数と15年の環境寿命を提供します。さらに、自律型コンピュータは熱負荷を管理しながら車両内に組み込むことからコンパクトでなければなりません。ダイサイズ 1平方センチメートルあたり 10ワット以上を消費する超高性能 GPU/CPU/FPGAチップのジャンクション温度制限を維持することは、自動車環境における主要な課題です。このサイズ、重量、消費電力 (SWaP) が最適化された堅牢な高性能組み込みコンピュータの設計は、ミッションクリティカルな軍事および航空宇宙システムでは一般的です。
Abaco Systems社には、ミッションクリティカルで堅牢な組み込みコンピューティングシステムを防衛、航空宇宙、および産業用アプリケーションに提供してきた豊富な実績があります。
バックグラウンド:
 自動運転車の実用化とその時期については多くの議論があります。しかし、メーカーが運転支援と自動化のレベルを高める機能に積極的に投資し、開発していることは間違いありません。
自動運転車の実用化とその時期については多くの議論があります。しかし、メーカーが運転支援と自動化のレベルを高める機能に積極的に投資し、開発していることは間違いありません。
多くの自動車メーカーやタクシー事業者が、2021年に高度自動化または完全自動化された車両を発売する計画を公表しています。
自動車メーカー、運輸安全機関、および一般市民は、衝突をなくし、結果として死亡、負傷、物的損害、およびその他の社会的コストを削減するという同じ動機を共有しています。死亡事故の大部分は、ドライバーのミスまたは不注意によるものであるため、動的な運転タスクをより高度な警戒と一貫したパフォーマンスが可能な自動運転システムに移行するという議論があります。この機会に加えて、これらのシステムのパフォーマンス、信頼性、およびセキュリティを確保すると同時に、大規模な自動車展開に適したコストとパッケージングの設計と統合のレベルを達成する責任があります。
先進運転支援システム (ADAS)– 自動化ビルディングブロック:
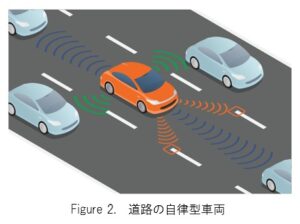
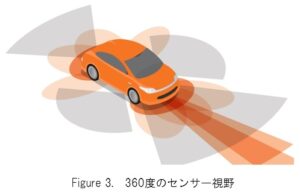
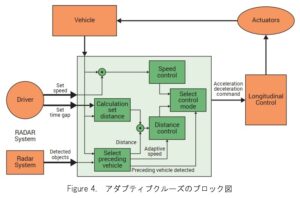
ADASは、車両自動化のための構成要素の多くを提供します。ADASを使用すると、レーダー、LIDAR (光検出と測距)、カメラ、超音波センサーなどの見通しセンサーが、車両から 0 ~ 200 メートル以内に 360度の環境認識能力を生み出し、アダプティブクルーズコントロール (ACC) などの縦方向の ADASコントロールと 車線維持支援システム (LKAS) のような横方向の ADASコントロールを可能にします。
センサーは物体を検出し、センサーの融合と処理を実行して、回避すべき危険や車両の位置を特定して配置するために使用される機能など、ターゲットの意味を判断します。
マイクロプロセッサベースのインテリジェント制御でこの情報を処理することで、ステアリング、ブレーキ、スロットルをソフトウェアベースで決定論的に作動させ、車間距離を維持し、車線超過をなくすことができます。 前述のように、これらの ADASセンサーとコントロールは通常-40° ~ +85°C の動作温度範囲の要件を満たしています。
車両自動化: 定義と推奨プラクティス:
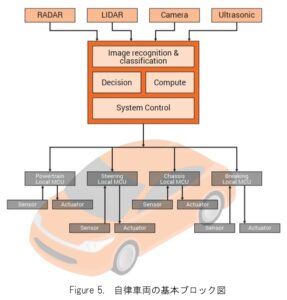
車両自動化は、ADASテクノロジ (位置センサー、測距センサー、画像センサー) を統合および拡張して、車両の周囲 360度の状況認識を実現します。 アルゴリズムは、デジタル制御のステアリング、ブレーキ、スロットルアクチュエータへのメッセージを生成し、自動運転機能を構成します。
高度な統合では、自律型コンピュータは集中型マルチドメインコントローラーになります。自動運転機能は、ADAS制御の基本的な拡張から、ドライバーによる手動制御さえない車両の完全な自動化へと進化します。
これらの進化のステップまたはレベルは、Society of Automotive Engineers (SAE) による推奨プラクティスを通じて制定され、その後、National Highway Traffic Safety Administration (NHTSA) によって承認されました。
これらの自動化レベルは、自動運転タスクとドライバーの役割 (存在する場合) の両方を表します。自動化のための完全な推奨プラクティス仕様 – J3016 はSAEから購入できます。
 自動化のLevel 1 は、個々の縦方向または横方向の ADASコントロールについて説明し、Level 2 は、縦方向および横方向の ADASコントロールの組み合わせについて説明します。Level 1 と 2 では、ドライバーが完全に関与し注意を払うことが期待されます。Level 3 は真の自動化の最初の例であり、特定の条件下で限られた時間だけ手足を使わずに運転できるようになります。
自動化のLevel 1 は、個々の縦方向または横方向の ADASコントロールについて説明し、Level 2 は、縦方向および横方向の ADASコントロールの組み合わせについて説明します。Level 1 と 2 では、ドライバーが完全に関与し注意を払うことが期待されます。Level 3 は真の自動化の最初の例であり、特定の条件下で限られた時間だけ手足を使わずに運転できるようになります。
低速のアダプティブクルーズコントロールStop-and-Goで渋滞やアクセス制限のあるハイウェイクルージングを実現します。Level 3 の自動化では、ドライバーが認識し、プロンプトが表示された場合に介入できることが期待されます。
ここでは、技術的な課題が最も困難な 4つの最も高度な自動化レベルのみを考慮します。
 Level 2: 部分的な運転自動化(手と足を離す):
Level 2: 部分的な運転自動化(手と足を離す):
ドライバーがオブジェクトとイベントの検出と応答のサブタスクを完了し、運転自動化システムを監視することを期待して、DDTの横方向と縦方向の両方の車両運動制御サブタスクの運転自動化システムによる持続的かつ運用設計ドメイン固有の実行。
 Level 3: 条件付き運転の自動化(目を離す):
Level 3: 条件付き運転の自動化(目を離す):
動的運転タスクのフォールバック準備完了ユーザーが、自動運転システムが発行した介入要求と動的運転を受け入れることを期待した、動的運転タスク全体の自動運転システムによる持続的かつ運用設計ドメイン固有のパフォーマンス。さらに、他の車両システムのパフォーマンスに関連するシステム障害をタスクし適切に対応する。
Level 4: 高度な自動運転(気にしない):
ユーザーが介入要求に応答することを期待せずに、動的運転タスク全体と動的運転タスクのフォールバックの自動運転システムによる持続的かつ運用設計ドメイン固有のパフォーマンス。
Level 5: 完全な運転自動化(ハンドルオプションまたは無人):
動的運転タスク全体と動的運転タスクのフォールバックの自動運転システムによる持続的かつ無条件の (つまり、運用設計ドメイン固有ではない) パフォーマンスは、ユーザーが介入要求に応答することを期待することはありません。
- SAE J3016、2016 年 9 月、オンロード自動車の運転自動化システムに関連する用語の分類と定義からの抜粋
Level 3 からLevel 4 の自動化 – パフォーマンスキャズム:
高速道路でのクルージングなどのLevel 3 の自動化機能では、車線内の車両の位置特定の改善と、車線構成、車線幅、ライダーマップからの道路形状に関する前方道路の知識が必要です。これは、ADAS車線維持システムと比較して、ドライバーが長時間快適に感じる車線中心の滑らかなプロファイルを生成するために必要です。
追加の入力情報と制御の高度化により、現在のLevel 1 および 2 ADASタイプのシステムをはるかに超える自律型コンピュータ処理のニーズが高まります。
Level 4 とLevel 5 の自動化に関して、業界の専門家はLevel 3 からLevel 4/5への移行は自動運転と自律性の境界線であり、これは困難で破壊的であると主張しています。Level 3 の自動化は、既知のシナリオ、経路計画、および関与する「コ・ドライバー」に基づく決定論的なアクションによって特徴付けられます。Level 4 と 5 は、「ドライバー」が実際には単なる乗客であり、完全にループから外れていることを前提としています。これには、複雑な判断、緊急の行動、および推論が可能な車両が必要です。つまり、思考するドライバーに取って代わるか、実際にはドライバーのいない車両になります。
このレベルの有効性には、人工知能つまり明示的に予測されていない条件下での特徴抽出、変換、および決定のためのディープラーニングニューラルネットワークが必要です。たとえば、Level 4 の自動化では、歩行者を識別して回避するだけでは十分ではありません。むしろ、車両は道路脇の歩行者が道路に足を踏み入れる可能性があるかどうかを、場所だけでなく、動き、身振り、および以前の経験に基づいて、確率論的に判断できなければなりません。
「センシング/認識/思考/判断」の自己学習型自動車の必要性により、オンボードコンピューターのパフォーマンスと処理能力は、ADAS とLevel 1 ~ 3の自動化を可能にする電子制御ユニットをはるかに超えて、数十テラフロップスから数百ワットの総設計電力に移行します。これは本質的に車内のスーパーコンピューターであり、かなりの熱を発生し幅広い温度範囲で長年にわたって確実に動作することが求められます。これは、今日の量産自動車に見られるものとは異なり、実際には、MIL-STD-810G環境および耐久性基準を満たす軍事および航空宇宙ミッションシステムの代表的なものです。
自動車安全システムの耐久性要因:
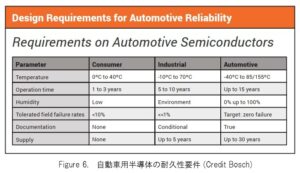
自動車用電子制御ユニットの環境要件と耐久性要件は、車両への取り付け位置とシステムの機能に基づいています。 場所については、客室、シャーシマウント、エンジン マウントが区別されますが、エンターテイメントから安全システムに至るまでのアプリケーションにもさまざまな要件があります。
セーフティエレクトロニクスの場合、-40°C ~ +85°C の動作温度範囲が一般的で、自動車用レーダーセンサーがその代表的な例です。比較すると、自動運転車の開発やレトロフィットフリートで一般的に使用される、トランクに取り付けられた商用グラフィックスワークステーションの一部は、通常、5° ~ 35°C の動作温度範囲向けに設計されています。
信頼性と耐用年数の要件も、民生用または商用の安全システムよりも自動車の安全システムの方が厳しくなっています。50% の信頼度で 97% の信頼性で 100,000 運用マイルの耐用年数 (~4000 時間) の期待は、その一例です。 また、15 年の環境寿命と 10ppm/年以下のモジュール故障率が一般的に期待されています。このタイプのモジュールの故障率目標は、コンポーネントの故障率を 1ppm 以下に押し上げます。
参考までに、自家用車は年間約 15,000マイル運転されますが、都市タクシーは 1 シフトまたは 2 シフトに基づいて年間 45,000 ~ 90,000マイル運転される場合があります。つまり、ロボタクシーが24時間利用されることが望まれます。
肝心なのは、「乗客」に代わってミッションクリティカルなLevel 4 の運転タスクを管理する電子システムは、少なくとも現在のアクティブセーフティシステムと同じくらい信頼できるものでなければならないということです。少なくとも、障害が発生した場合でも、自律型コンピュータは、障害を自己検出して診断し、規定のフォールバック戦略を実行するのに十分な機能を保持することを期待するのが合理的です。
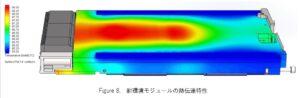
自動車の温度と耐久性の期待を満たす、数百ワットの熱設計能力を持つ自律型コンピュータを設計することは簡単ではありません。シリコンチップのジャンクション温度から外界まで、すべての熱伝達モードを完全に理解し、管理する必要があります。
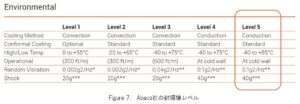
Abaco社は、軍事、航空宇宙、および産業用電子機器における実績に基づいて、頑丈で、サイズ、重量、電力 (SWaP) が最適化され、-40°C ~ +85°C の動作温度要件を満たす高性能組み込みコンピュータの設計と製造の経験があります。
熱管理 – 課題、差別化要因、および成功:
新世代のプロセッサ、GPU、アクセラレータ、およびソリッド ステートストレージデバイスにより、設計者は継続的により多くのコンピューティングパワーを利用できるようになり、オートノミー エンジニアは処理パフォーマンスに対する飽くなき渇望を抱いています。これらの優れたパフォーマンスレベルは、これまで以上に高い電力と電力密度レベルを管理するという課題をもたらします。この現実は、ホストとしての自動車によって提示されるスペースの制限と過酷な環境によって悪化します。
10 W/cm2 オーダーのシリコンダイの熱流束レベルは、ホットプレートの熱流束を超えています。ボードレベルでは、85°C のカードエッジ温度と 105°C の半導体ジャンクションリミットにより、最大 20°C の上昇を保証する熱経路効率が要求されます。これは、熱エネルギーを抽出、移動、および排除する高度な技術によって実現されます。
Abaco社は、設計によってスペースの制約を満たし、長期的な信頼性を達成しながら、高い消費電力の課題に対処するための、伝統的で強力な熱管理の独自技術を備えています。典型的な例は、国防高等研究計画局 (DARPA) プロジェクトへの Abaco社の参加であり、GEグローバルリサーチセンターと協力して、Abaco Systems社は革新的な熱放散技術の開発におけるリーダーとしての地位を確立しました。2000年代半ばに DARPAがグランドチャレンジとアーバンチャレンジを後援したことは、自動運転車の研究開発に対する自動車業界全体の集中的な投資のきっかけとなったことも事実です。
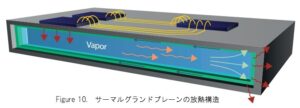
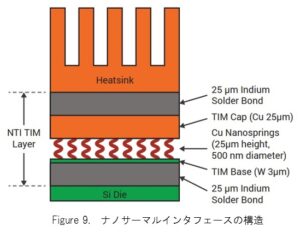 Abaco社は、ラボから運用環境への熱技術の移行に成功しDARPAプログラムの戦略的差別化要因と見なされています。DARPAの成功には、Nano Thermal Interface (NTI) と Thermal Ground Plane (TGP) が含まれます。 NTI は、シリコンチップと銅製ヒートシンクなどの熱膨張係数が一致しない材料の間の表面のマイクロギャップを埋めることができる適合インターフェースを提供することにより、熱抽出を強化します。
Abaco社は、ラボから運用環境への熱技術の移行に成功しDARPAプログラムの戦略的差別化要因と見なされています。DARPAの成功には、Nano Thermal Interface (NTI) と Thermal Ground Plane (TGP) が含まれます。 NTI は、シリコンチップと銅製ヒートシンクなどの熱膨張係数が一致しない材料の間の表面のマイクロギャップを埋めることができる適合インターフェースを提供することにより、熱抽出を強化します。
Nano Thermal Interface プログラムにより、最先端のインターフェース材料よりも熱抵抗が 10倍向上したサーマルインターフェース材料 (TIM) が開発されました。TGPは蒸気相の動きによって放熱能力を大幅に向上させ、厳しい環境でより要求の厳しいコンピューティング動作をサポートします。
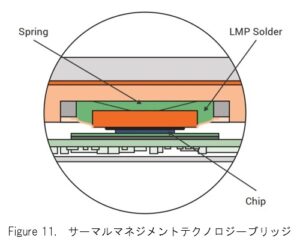
DARPAプログラムの開発に加えて、サーマルマネジメントテクノロジーブリッジ (TMTB) やデュアルクールジェット (DCJ) など、Abaco社が資金提供する社内 R&Dプログラムがクラス最高のパフォーマンスシステムに展開されています。
要求の厳しい伝導冷却アプリケーションの場合、TMTB は、サーマルグリース、金属製ヒートスプレッダー、ギャップパッドなどのサーマルインターフェイスマテリアルのスタックを使用して、1つまたは複数の高出力プロセッサに取り付けられた金属製ヒートフレームによる抽出を改善します。熱除去のために、Abaco社独自の Dual Piezo Cool Jets (DCJ) 技術は、圧電マイクロ流体デバイスに基づく効率的な強制対流冷却技術を提供し、ほこりや騒音が要因となる冷却ファンの必要性を軽減します。さらに、Abaco Systems社は、メザニンカードを搭載するスペースに制約のあるプロセッサカードのヒートフレーム内で利用できるヒートパイプ技術を認定しています。これらのヒートパイプは頑丈で、固体の銅製ヒートフレームと比較して2.5倍の熱改善をもたらします。これにより、プロセッサは最大能力で動作したり、動作温度を下げて信頼性を向上させることができます。
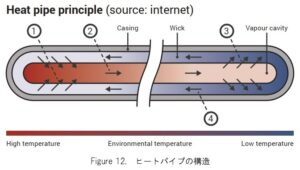
ヒートパイプの熱サイクル
- 作動流体が蒸発して蒸気になり、熱エネルギーを吸収します
- 蒸気はキャビティに沿って低温端に移動します
- 蒸気は凝縮して液体に戻り、芯に吸収されて熱エネルギーを放出します
- 作動流体は高温端に戻ります

車両パッケージングのニーズ – レトロフィットとラインフィット:
Level 4 の自動化対応車両の展開計画は、2つの異なる「レース」に従っています。自動化機器の「キット」を使用して現場で適合させたタクシー車両と、車両組立ラインで自動化機器を「ラインフィット」してディーラーを通じて販売される「小売」車です。どちらの場合も、研究開発活動は通常、自動車グレードではなく、最小のサイズ、重量、電力、およびコストが最適に設計されていない機器を使用して行われています。
フリートのレトロフィット – ロボタクシー:
ロボタクシーの場合、車のトランクに機器を詰め込み、コストをあまり気にする必要はありません。最終的に、ドライバーの給与やその他のコストがなくなるとかなりの設備予算が得られます。ロボタクシーの設備は、ビジネスケースを壊すことなく 10万ドルかかる可能性があります。
レトロフィットアプローチは、市場投入までの時間も最短にします。それでも、機器は自動車の耐久性と信頼性の要件を満たす必要があります。
 ファクトリーラインフィット:
ファクトリーラインフィット:
ディーラーを通じて販売される自家用車両は、マスマーケットでの手頃な価格、責任ある統合という点で、非常に異なるビジネスケースのパラダイムを提示します。消費者調査によると、価格に対する感度が非常に高く人々が自動運転のために喜んで支払うプレミアムは、ハイブリッド電気自動車またはバッテリー電気自動車の増分コストにすぎない可能性があります。価格に敏感であることに加えて、自家用車の所有者はトランクにスーツケースや食料品を入れられることを期待しています。
つまり、大衆市場向けの自律型コンピュータは、手頃な価格であるだけでなく、コンパクトで車両が押しつぶされるゾーンから離れた場所に安全に配置されている必要があります。車内が理想的ですがファンの騒音が大きすぎると不快になるため、冷却モードへのアクセスに課題があります。熱管理のニーズを満たしながら、自律型コンピュータのサイズを現実的でコンパクトなフォームファクターに凝縮する Abaco社の能力は、真の差別化要因であり車両への深い統合の鍵となります。
まとめ:
 Level 4 の自動化には、大量の複雑なデータを処理、通信、保存できる高性能コンピューティングプラットフォームが必要です。このレベルのパフォーマンスが現在展開されている民生用および商用アプリケーションとは異なり、この自律型コンピュータは、現在および将来の自動車アクティブセーフティシステムに基づいて自動車メーカーが確立した環境および信頼性の要件を満たす必要があります。
Level 4 の自動化には、大量の複雑なデータを処理、通信、保存できる高性能コンピューティングプラットフォームが必要です。このレベルのパフォーマンスが現在展開されている民生用および商用アプリケーションとは異なり、この自律型コンピュータは、現在および将来の自動車アクティブセーフティシステムに基づいて自動車メーカーが確立した環境および信頼性の要件を満たす必要があります。
Abaco社の専門知識と最適化ツールを使用して、堅牢でサイズ/重量と電力が最適化された高性能自律型コンピュータを設計、テスト、製造することは、真の差別化要因であり自動運転車の大量展開の鍵となります。
原文ドキュメント:Abaco Systems社
autonomy_computer_for_highly_automated_vehicles_-_the_need_for_rugged_and_size_weight_and_power_optimization.pdf
Autonomy Computer for Highly Automated Vehicles
関連製品

SBC3511:Intel Xeon E (Coffee Lake Refresh) 搭載 CPUボード (VPX)
SBC3612D:Intel Xeon D-2700 搭載 CPUボード (VPX)
SBC3513:SOSA準拠 Intel Xeon W (Tiger Lake H) 搭載 CPUボード (VPX)
Abaco Systems社について
Abaco Systems社は、30年以上前の英国Plessey Microsystems社がルーツとなる企業です。Plessey社はICS社とOctec社を買収してRadstone社となりました。2006年にRadstone社は、SBS社、VMIC社、Condor社などの組み込みコンピューティング企業を買収したGE Fanuc Embedded Systems社に買収されました。2015年にEmbedded Computing部門がVeritas Capital社に買収され、Abaco Systems社が誕生しました。更にAbaco Systems社は4DSP社を買収し、FPGAボードやAD/DA FMCモジュールのラインナップを拡充して組み込みシステムビジネスのリーダーとしてマーケットを牽引しています。Abaco Systems社の詳細については、www.abaco.comを参照してください。