レーダの基本原理:
レーダは、電波を使用して、航空機、船舶、宇宙船、誘導ミサイル、自動車、天候、地形などの移動および固定ターゲットの範囲、高度、方向、速度を識別するターゲット検出システムです。レーダディッシュ(アンテナ)は、マイクロ波レンジの電波のパルスを送信し、そのパス内のオブジェクトを反射させます。物体は、電波エネルギーのごく一部を、通常は送信機と同じ場所にあるディッシュ(アンテナ)に返します。レーダが提供する情報には、ターゲットの方位と範囲、位置が含まれます。したがって、このような位置検出の必要性が重要な分野で広く利用されています。
レーダアプリケーション:
レーダの最初の使用は、軍事目的で、空、地上、海のターゲットを見つけることでした。これは民間の分野で航空機、船舶、道路の用途に進化しました。航空機の場合、航空機にはレーダ装置が装備されており、経路内または障害物に近づいていることを警告し、正確な高度を読み取ります。彼らはレーダ支援システムを装備した空港に霧の中で着陸することができます。そこでは、飛行機がレーダ画面で観測され、管制塔のオペレータがパイロットに方向を指示し誘導します。船舶レーダは、船舶の方位と距離を測定して他の船舶との衝突を防ぎ、海岸の範囲内にあるときは海上での位置固定に使用したり、島、ブイ、灯台などの他の固定基準に使用されたりします。車を運転する多くの人が、道路上の速度超過を監視するために警察が使用するレーダ銃を知っていると思います。レーダは軍事以外の多くの分野に利用されています。気象学者はレーダを使用して降水量を監視します。これは、天気予報の主要なツールとなり、雷雨、竜巻、ハリケーンなどを監視するために使用されています。地質学者は、特殊な地中探知レーダを使用して地殻の組成をマッピングします。
コニカルスキャンレーダ:
コニカルスキャンシステムは、アンテナのボアサイトの片側にわずかに信号を送り、フィードホーンを回転させて、ローブをボアサイト線の周りに回転させます。ボアサイトを中心とするターゲットは、常にローブによってわずかに照らされ、強力なリターンを提供します。ターゲットが片側にずれている場合、ローブがその方向に向けられている場合にのみ点灯し、その結果、リターンが弱くなります。この信号は、アンテナがターゲットの方向に揃うように回転すると最大になります。この最大値を探してアンテナをその方向に動かすことでターゲットを自動的に追跡できます。
カリフォルニア州ゴールドストーンの直径70mのアンテナをFigure 1に示します。円錐走査レーダの妨害は比較的簡単です。ジャマーがしなければならないことは、レーダの周波数で、それが最も強いリターンであると思わせるのに十分な強度で信号を送信することです。この種の妨害は、信号のタイミングをフィードの回転速度と同じにすることで、より効果的にすることができます。
フェーズドアレイレーダ:
Figure 2は、合成開口レーダポッドが航空機の下側に取り付けられたUAV(無人航空機)です。このフェーズドアレイレーダは、適切に間隔を空けたアンテナエレメントの線形または2次元アレイのいずれかを使用することにより、それぞれ制御可能な位相シフトを持つ異なるステアリング方法を利用します。これにより、特定の方向で最大の強度を得るために、受信信号または送信信号が積極的に強化されます。フェーズドアレイレーダは物理的な動きを必要としないため、ビームは毎秒数千度でスキャンできます。多くの個別ターゲットを追跡するのに十分に速く、また広範囲の検索を実行することができます。
モノパルスレーダ:
モノパルスレーダは、構造的にコニカルスキャンシステムに似ていますが、固有の機能があります。信号をそのままアンテナから送信する代わりに、信号を分割しわずかに異なる方向にパルス信号を送信します。反射信号を受信すると、それらを別々に増幅し互いに比較します。これは、どの方向がより強いリターンを持っているかがわかります。これにより、照準に対するターゲットの一般的な方向を示します。この比較は1パルス中に実行されるため、ターゲット位置またはヘディングの変更は比較に影響しません。この比較を行うには、ビームの異なる部分を互いに区別する必要があります。これは、パルスを分割しそれぞれを別々に分極してから、わずかに軸から外れたフィードホーンのセットに送信することで実現されます。これにより、ボアサイト上でローブのセットが重なります。これらのローブは、通常の円錐スキャナーのように回転します。2つの受信信号は再び分離され、1つはパワーを反転して差を取得し、2つが加算されます。ターゲットが照準器の片側にある場合、結果の合計は正になります。反対側にある場合は負となります。ローブの間隔が狭い場合、このシステムは高い精度を実現できます。コニカルスキャンシステムは0.1度のポインティング精度を生成しますが、モノパルスレーダはこれを1桁以上改善します。これは、100kmの距離で10mの精度になります。耐妨害性は、コニカルスキャンシステムよりも向上しています。フィルタを挿入して、偏光されていない信号または一方向に偏光された信号を除去できます。このようなシステムと混同させるために、妨害信号はモノパルスレーダの偏光とタイミングを複製する必要があります。
モノパルスレーダ信号処理:
レーダの位置から15 km – 45 kmの距離にある航空機のターゲットを追跡すると仮定します。レーダ信号は、300,000km/secに等しい光の速度で移動します。15kmのターゲットの場合、レーダパルスの往復には2 x 15km÷300,000 km/sec = 100μsecかかります。45kmのターゲット
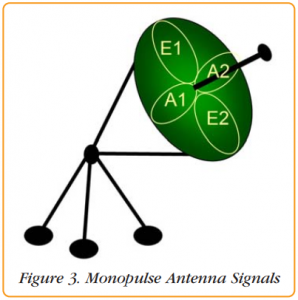
これは、典型的なモノパルスレーダーアプリケーションに関連する信号処理の実例です。Figure 3に示すように、システムは、受信信号が方位角、仰角、およびこれら2つの合計の3つのタイプで構成されるマルチエレメントアンテナを使用します。デジタル化および処理される信号は次のとおりです。
● A1 – A2に等しい方位差またはΔA
● E1 – E2に等しい標高差またはΔE
● A1 + A2 + E1 + E2の合計に等しい合計チャンネルΣ
● ΣとΔE間の位相シフトにより、ターゲットの標高が決まる
● ΣとΔA間の位相シフトにより、ターゲットの方位角が決まる
● 信号のIF中心周波数は140 MHz、IF帯域幅は40 MHz
● 信号処理には、3チャネルのA/Dコンバーターが必要
レーダの位置から15 km – 45 kmの距離にある航空機のターゲットを追跡すると仮定します。レーダ信号は、300,000km/secに等しい光の速度で移動します。15kmのターゲットの場合、レーダパルスの往復には2 x 15km÷300,000 km/sec = 100μsecかかります。45kmのターゲットの場合、往復には2 x 45÷300,000km/sec= 300μsかかります。Figure 4は、データの収集に必要なタイミングを示しています。T0で50μsecパルスを生成します。
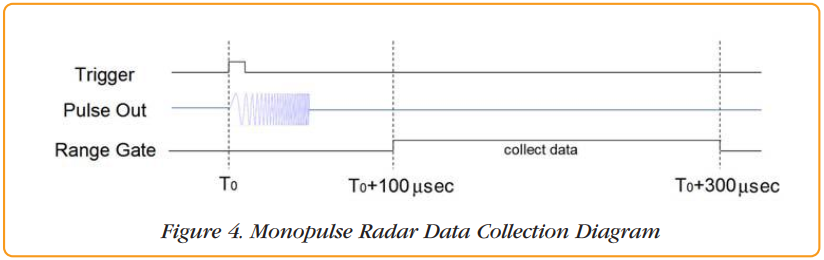
T = T0 + 100μsecでデータの収集を開始します。 T = T0 + 300μsecでデータ収集を停止します。
Figure 5およびFigure 6に示すPentek社 Model71621 XMCモジュールを使用してデータを処理します。このモジュールには3chの200 MHz、16ビットA/Dが装備されています。ブロック図に示すように、Virtex-6 FPGA、クロックシンセサイザ、インターポレータと2chの800 MHz、16ビットD/Aを備えたデジタルアップコンバータ、2つのメモリバンクを備え、PCIeインタフェース経由で2.0 GB/sのデータ転送をサポートします。
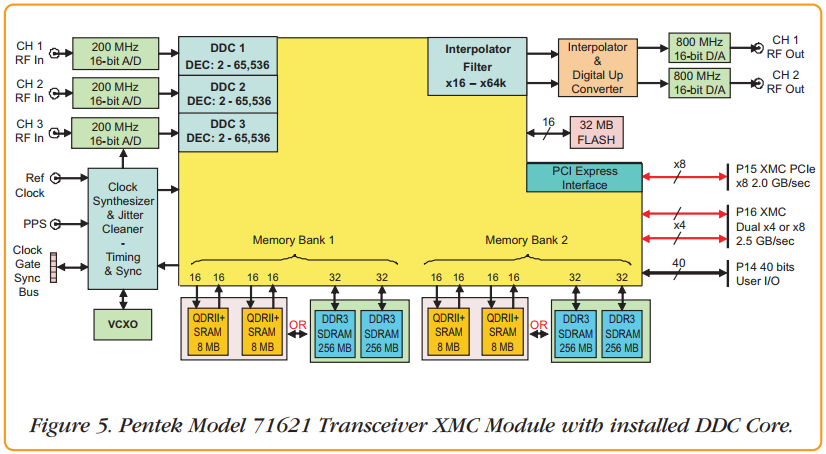

モノパルスレーダシステムの信号処理を容易にするために、Model71621にはVirtex-6 FPGAに予めインストールされた3つのワイドバンドDDC(デジタルダウンコンバータ)コアが実装されています。このIPコアは、2~65,536の間引きを提供し、中心周波数の個別チューニングを提供します。
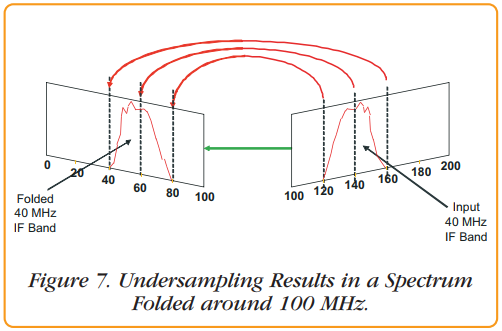
リソースを節約するために、入力信号をデジタル化するためのアンダーサンプリングソリューションを試みます。200 MHzでサンプリングすると、対象の信号はFigure 7に示すように折りたたまれます。120MHz信号帯域下端は80 MHzに変換されます。140MHzの中心周波数は60MHzに変換されます。信号帯域の上端は40MHzに変換されます。Model71621にインストールされたDDCコアのデシメーション設定と中心周波数を計算する必要があります。デシメーション設定DEC = 0.8 x fs÷帯域幅。 200 MHzのサンプリング周波数と40 MHzの帯域幅の場合、DEC = 0.8 x 200÷40 = 4。デシメーションの範囲は2~65,536です。アンダーサンプリングは140 MHz IFを60 MHzにフォールドするため、必要なDDC中心周波数の調整は60 MHzです。IPコアはDCからfs/2(またはDCから100 MHz)に調整されるため、ローカル発振器は60MHzに設定されます。このIPコアは、必要なチューニングと帯域幅を適切に処理します。
波形信号発生器:
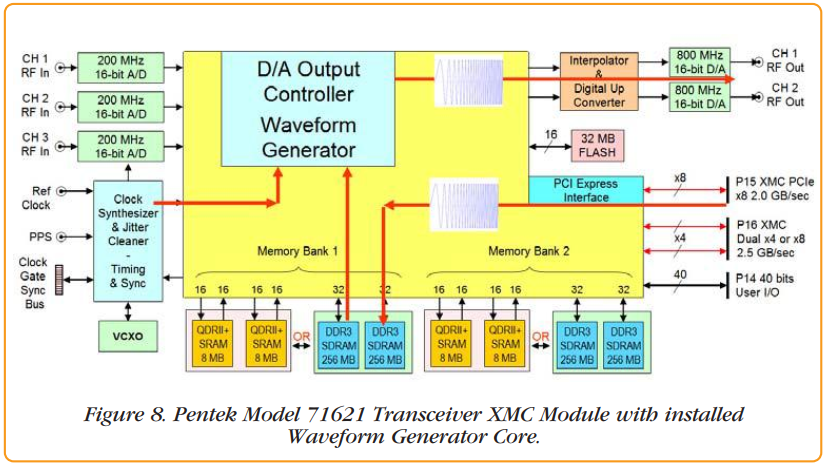
次に、Model 71621モジュールを使用してレーダ信号を作成します。Figure 8に示すように、信号波形はデジタル振幅サンプルのブロックとしてユーザーによって作成され、PCIeインタフェースを介してモジュールのQDRまたはSDRAMメモリにロードされます。次に、Virtex-6 FPGAにインストールされている波形エンジンIPコアに転送されます。エンジンは、波形サンプルをDUCおよびD/Aに出力します。トリガー、ゲート、連続ループ、遅延などの複数のモードを作成できます。
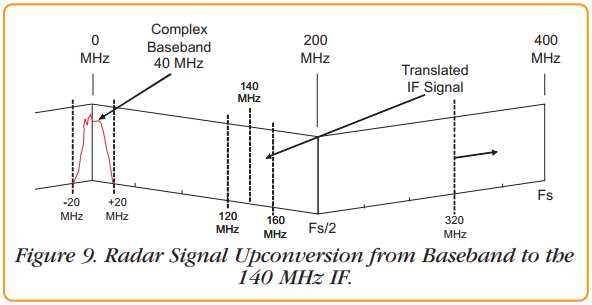
Figure 9に示すように、40MHzの帯域幅を持つように複素ベースバンド信号を選択しました。140MHz IFに変換すると、40MHzの信号は120 MHzから160MHzに変換されます。出力サンプリング周波数は、160MHzの最高周波数の少なくとも2倍(最低320 MHz)でなければなりません。安全のために400 MHzを選択し、補間フィルタとDUCを使用してベースバンドをIF周波数に変換します。
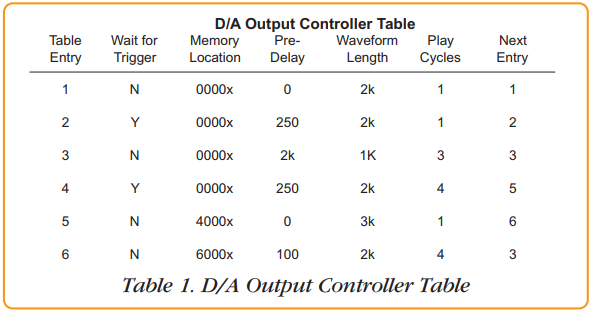
デジタル波形ベースバンドサンプリング周波数(fb)の補間係数を計算するには、fb = 1.25 x帯域幅、つまり1.25 x 40 MHz = 50 MHzとなり、補間係数はINT = D/A出力レート(fs)÷ベースバンド入力レート(fb)= 400 MHz÷50MHz = 8となります。DAC5688で利用可能な補間係数は2、4、8です。 したがって、INTを8に設定します。DUC局部発振器の範囲はDC~fs/2またはDC~200MHzであるため、局部発振器を140MHzに設定します。D/A出力コントローラテーブルの一般的なパラメータをTable 1に示します。このテーブルは、D/A波形発生器を制御し、これらのパラメータを異なるメモリ位置に保存するために使用されます。テーブルエントリは、生成されるさまざまな波形の開始アドレスと波形の長さ、トリガー、ループ、遅延などを指定します。各テーブルエントリは、異なる波形シナリオを表します。
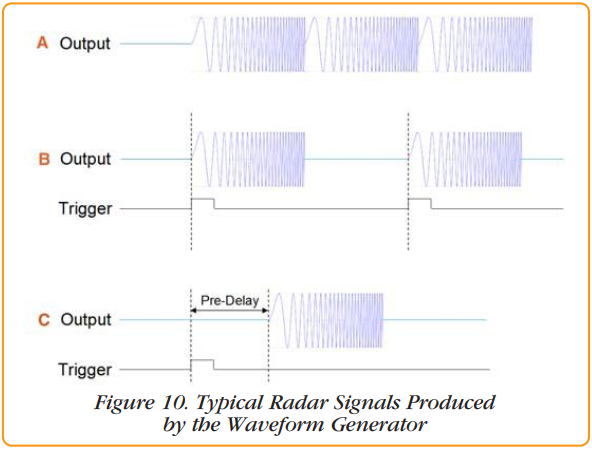
Figure 10は、3つの典型的な波形を示しています。波形Aは、ジェネレータが連続して動作し、無限ループで繰り返す連続波形を示しています。波形Bはトリガーにより、入力トリガーごとに1つのレコードを生成します。最後に、波形Cは、ジェネレータが指定された遅延を待機した後、波形を1回出力するプリディレイシングルです。
レーダパルス信号取得:
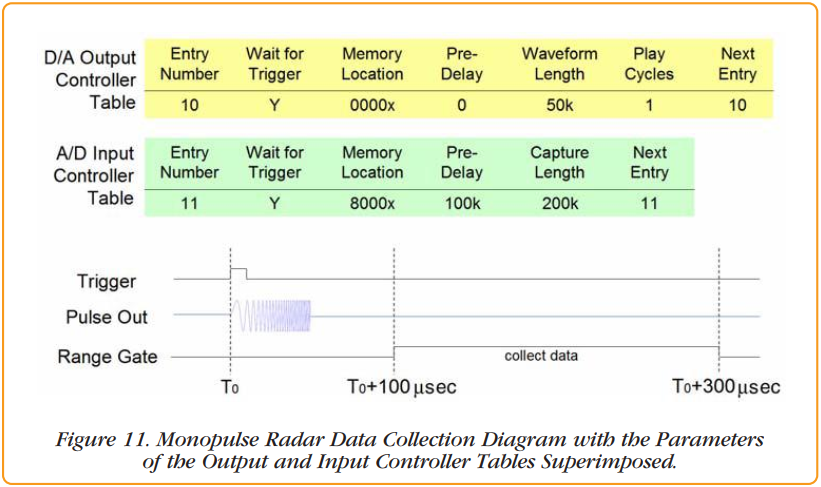
Figure 11はFigure 4と似ていますが、発信レーダパルスの生成とターゲットから返された信号の取得に関連するため、ここではD/A出力コントローラーとA/D入力コントローラテーブルのエントリを重ね合わせています。範囲はFigure 4の場合と同じです。つまり、レーダの位置から15 km~45 kmの範囲のターゲットです。
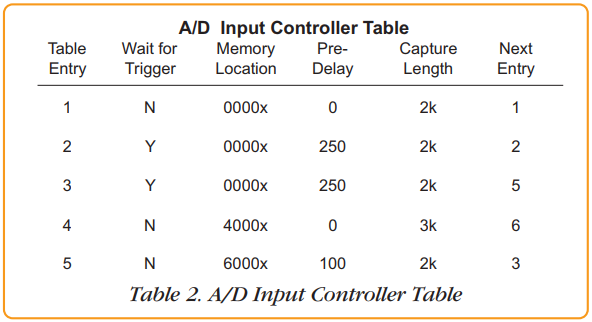
受信したレーダデータを処理するために、3チャネルすべてでA/Dサンプルを同時に収集する同期サンプリングを利用します。データ収集は、発信トリガーパルスに正確にタイミングを合わせる必要があります。レンジゲートの仕様は事前に計算されており、高速アクセスのために事前にロードする必要があります。D/A出力コントローラテーブルの場合と同様に、ユーザーはTable 2に示すようなA/D入力コントローラテーブルに入力するだけです。
テーブルパラメータは、レンジゲートのタイミングを制御し、A/Dデータを保存するためのメモリ位置、保存するサンプルの数、トリガ、遅延、チェーンなどを制御するパラメータを指定します。
Figure 11はFigure 4と似ていますが、発信レーダパルスの生成とターゲットから返された信号の取得に関連するため、ここではD/A出力コントローラーとA/D入力コントローラテーブルのエントリを重ね合わせています。範囲はFigure 4の場合と同じです。つまり、レーダの位置から15 km~45 kmの範囲のターゲットです。
まとめ:
Pentek製 Model71621トランシーバXMCモジュールは、完全なレーダ信号生成、タイミング、および取得サブシステムです。モノパルスレーダに必要な3chのA/Dと、信号生成および取得タイミングの標準オンボードサポートを備えています。レーダデータの取得は、40MHz帯域幅で140MHz IF信号をキャプチャする200 MHz、16ビットA/Dによって促進されます。 ワイドバンドDDC IPコアは、IF信号をベースバンドに変換します。A/D入力コントローラーエンジンは、プログラム可能な遅延、取得レコード長、複雑な取得シナリオを作成する単純なパラメーターテーブルを使用します。
レーダ波形生成では、単純なパラメーターテーブルを備えたD/Aコントローラエンジンを使用します。プログラム可能な遅延と長さを持つ複数の波形を作成します。ワイドバンドDUCはデジタルベースバンド波形を140 MHz IFにアップコンバートし、400 MHz、16ビットD/Aは40MHz帯域幅の140MHz IF信号を提供します。
————————————————————
原文ドキュメント:Pentek社
PIPE192.pdf
Radar Topics, Applications, and Pentek Products
関連製品

Model 78620:200MHz A/D & 800MHz D/A搭載 FPGAボード (VPX/cPCI/AMC/XMC/PCIe)
Model 78630:1GHz A/D & 1GHz D/A搭載 FPGAボード (VPX/cPCI/AMC/XMC/PCIe)
Model 78720:200MHz A/D & 800MHz D/A搭載 FPGAボード (VPX/cPCI/AMC/XMC/PCIe)
Model 78730:1GHz A/D & 1GHz D/A搭載 FPGAボード (VPX/cPCI/AMC/XMC/PCIe)
Model 78821:200MHz A/D & 800MHz D/A搭載 FPGA(DDC内蔵)ボード (VPX/cPCI/AMC/XMC/PCIe)
Model 54821:VITA66/67準拠 200MHz A/D & 800MHz D/A搭載 FPGA(DDC内蔵)ボード (VPX/cPCI/AMC/XMC/PCIe)
![]()
Pentek社について
Pentek社は、ISO 9001:2015認定企業として、デジタル信号処理・ソフトウェア無線・データ収集用の組込みコンピュータボードおよびレコーディングシステムを設計・製造しています。製品には、商用環境と耐環境の両方に対応したAMC、XMC、FMC、PMC、cPCI、PCIe、VPXのフォームファクタで準備されており、レーダ、無線通信、SIGINT、ビームフォーミング等の用途に幅広く利用されています。Pentek社の詳細については、www.pentek.comをご参照ください。